这是我的就地快速排序算法的实现,来自this视频的改编:
def partition(arr, start, size):
if (size < 2):
return
index = int(math.floor(random.random()*size))
L = start
U = start+size-1
pivot = arr[start+index]
while (L < U):
while arr[L] < pivot:
L = L + 1
while arr[U] > pivot:
U = U - 1
temp = arr[L]
arr[L] = arr[U]
arr[U] = temp
partition(arr, start, L-start)
partition(arr, L+1, size-(L-start)-1)
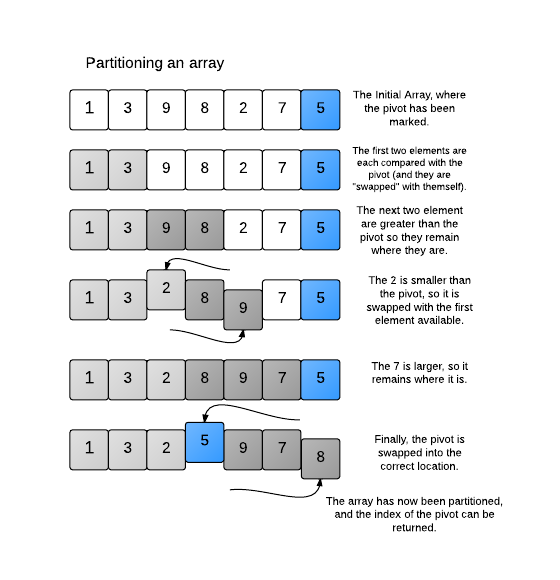
似乎有一些扫描步骤的实现,其中阵列(或阵列的当前部分)被分成3个段:低于枢轴的元件,枢轴和大于枢轴的元件 . 我从左边扫描大于或等于枢轴的元素,从右边扫描小于或等于枢轴的元素 . 一旦找到其中一个,就进行交换,循环继续,直到左标记等于或大于右标记 . 但是,在this图表后面还有另一种方法,在许多情况下可以减少分区步骤 . 有人可以验证哪种方法实际上对快速排序算法更有效?
{kind=link}
1 回答
你使用的两种方法基本相同 . 在上面的代码中
索引是随机选择的,因此它可以是第一个元素或最后一个元素 . 在链接https://s3.amazonaws.com/hr-challenge-images/quick-sort/QuickSortInPlace.png中,他们首先将最后一个元素作为pivot,并以与在代码中相同的方式移动 .
所以两种方法都是一样的 . 在您的代码中,您随机选择数据透视图,在图像中 - 您说明了数据透视表 .